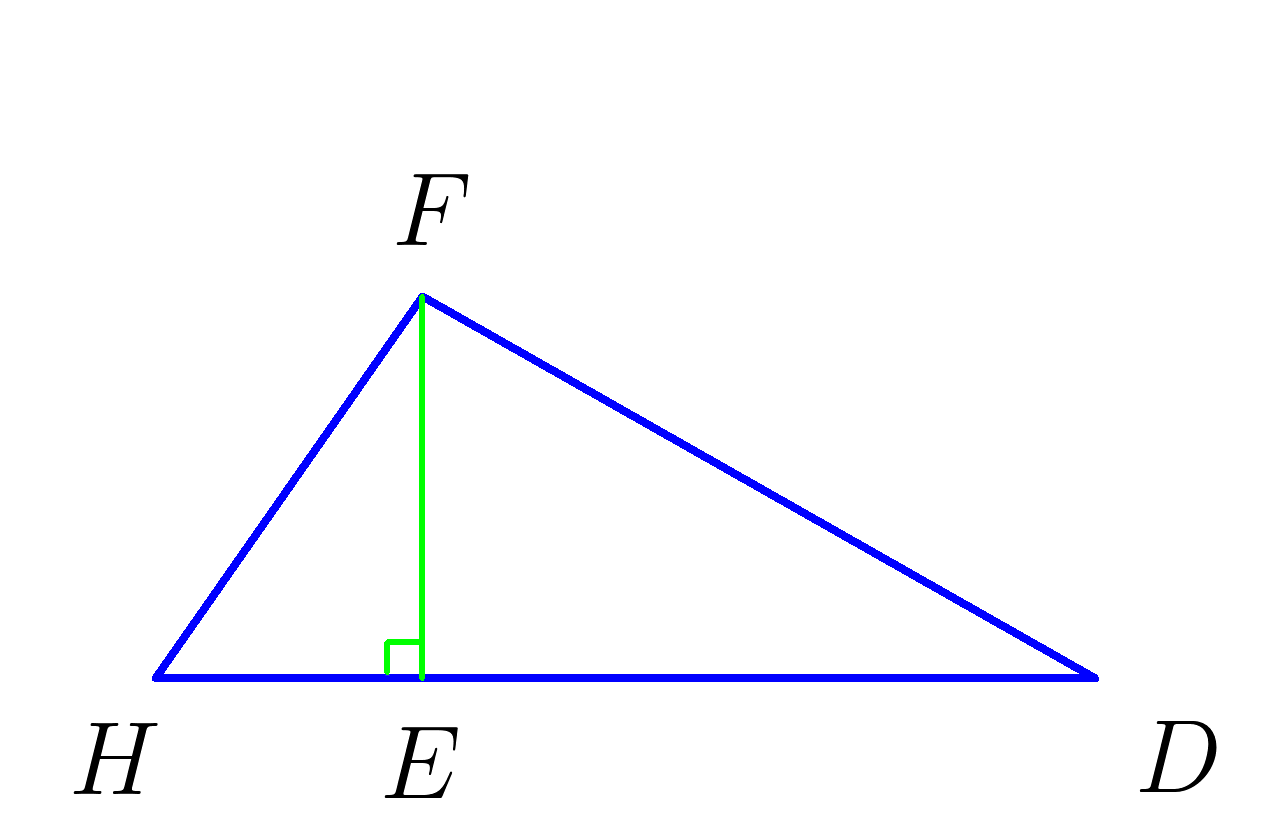
Мы знаем FH, FD и FE. Вычисли HE + ED.
HE + ED = sqrt(FH^2 - FE^2) + sqrt(FD^2 - FE^2)
Просто, понимаешь, ты говоришь что знаешь только дальность Дрон-Цель и дальность Дрон-Ты. А это всего лишь две стороны. Ты не можешь физически решить треугольник зная лишь две стороны. Тебе нужно больше данных) Либо углы, либо что-то ещё, в этом примере - высота.
Высота - это реальная высота над землёй твоего дрона. Вычисления максимально точны на поверхности без сильных перепадов высот. В любом случае тебе придётся проводить пристрелку.
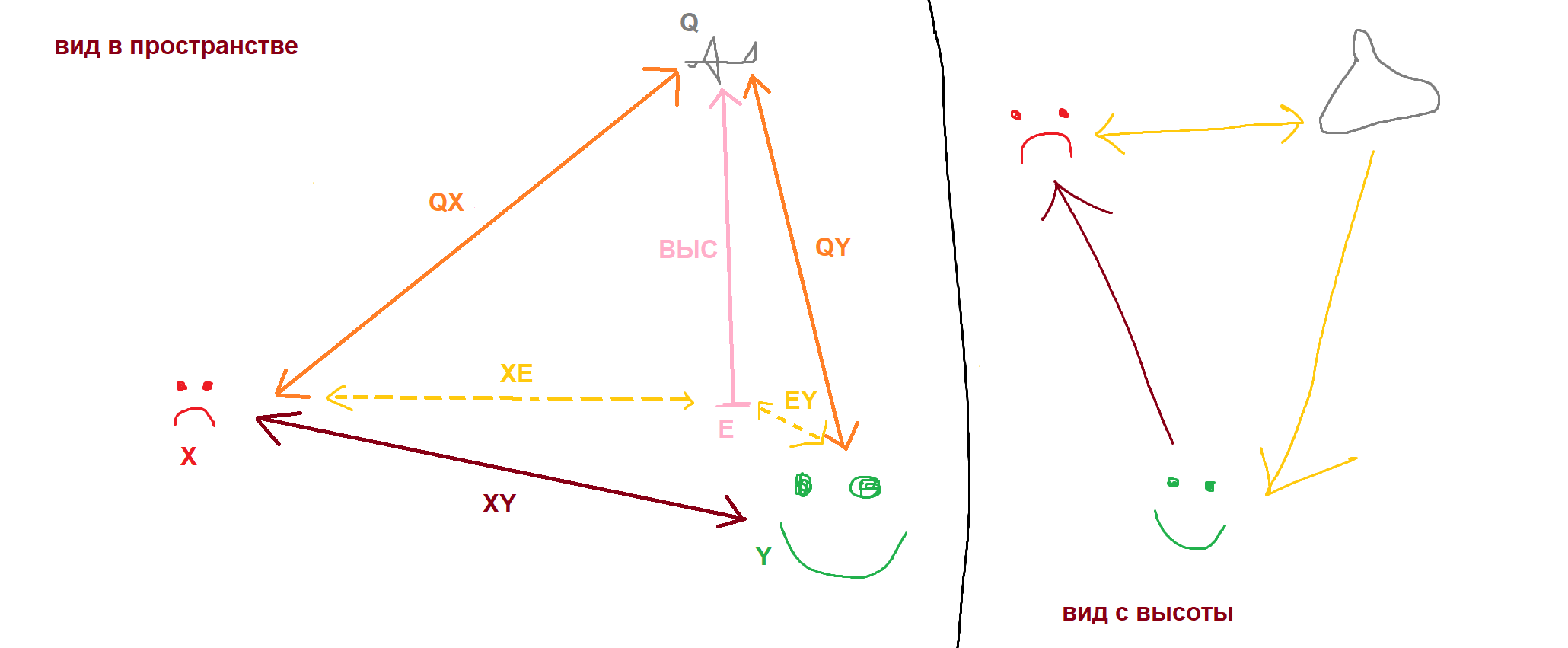
Я так понимаю, что ты предлагаешь искать отрезки XE и EY зная, что они составляют прямоугольный угол и искать его из дальности до цели и радиовысоты дрона. И… зачем? Мне нужна длина отрезка xy, а знаю я длину qx, qy и рвыс, а высчитывать расстояние от нулевой радиовысоты дрона до цели и моего танка не даст ничего. Высчитывать гипотенузы из xe и ey? Ну так угол не будет всегда прямым чтобы сделать это.
Если дрон за целью, то тебе надо всё также решить два треугольника. Большой треугольник Дрон-Нормаль-Ты и малый треугольник Дрон-Нормаль-Цель, вычтя малую сторону из большой опять получишь дальность Ты-Цель.
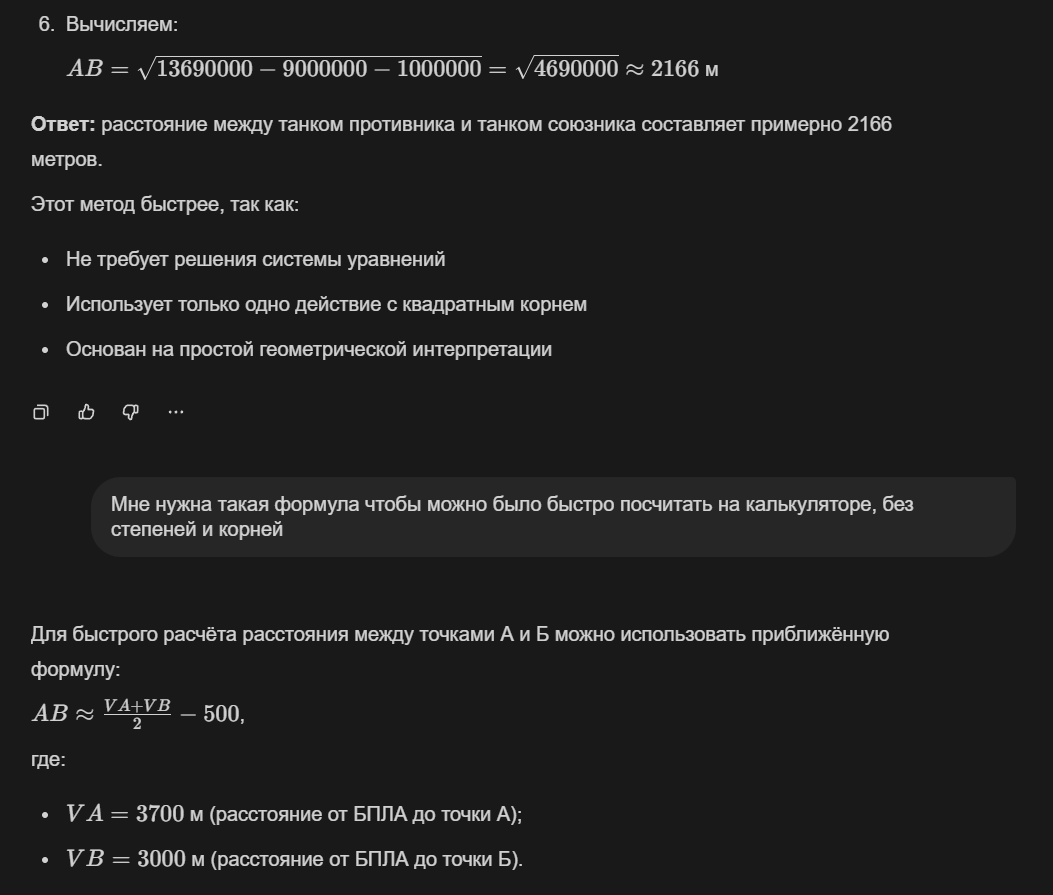
FE это всего лишь высота дрона. Я говорил о случае когда дрон находится на прямой Ты-Цель. В трёх измерениях тебе нужно больше данных. Азимуты можешь как-то смотреть?
Если можешь азимуты на цель и на себя смотреть, то можно решить, в принципе. Т.к. азимуты будут углом XEY, у тебя будет две стороны XE и EY, решаемых из ВЫС и QX/QY, а также угол XEY из разницы азимутов на тебя и на цель.
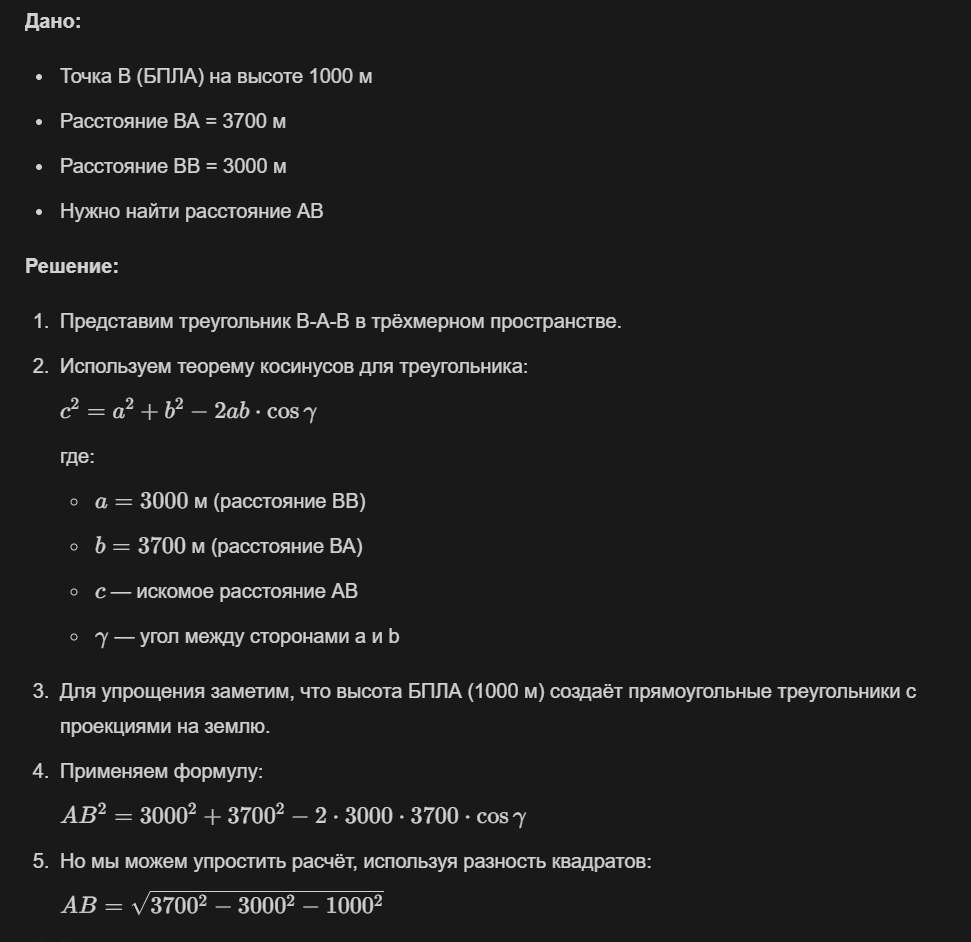
Две стороны и угол между ними позволяют найти третью сторону через теорему косинусов:
Тогда я не представляю как ты хочешь сделать это зная только две дальности и высоту
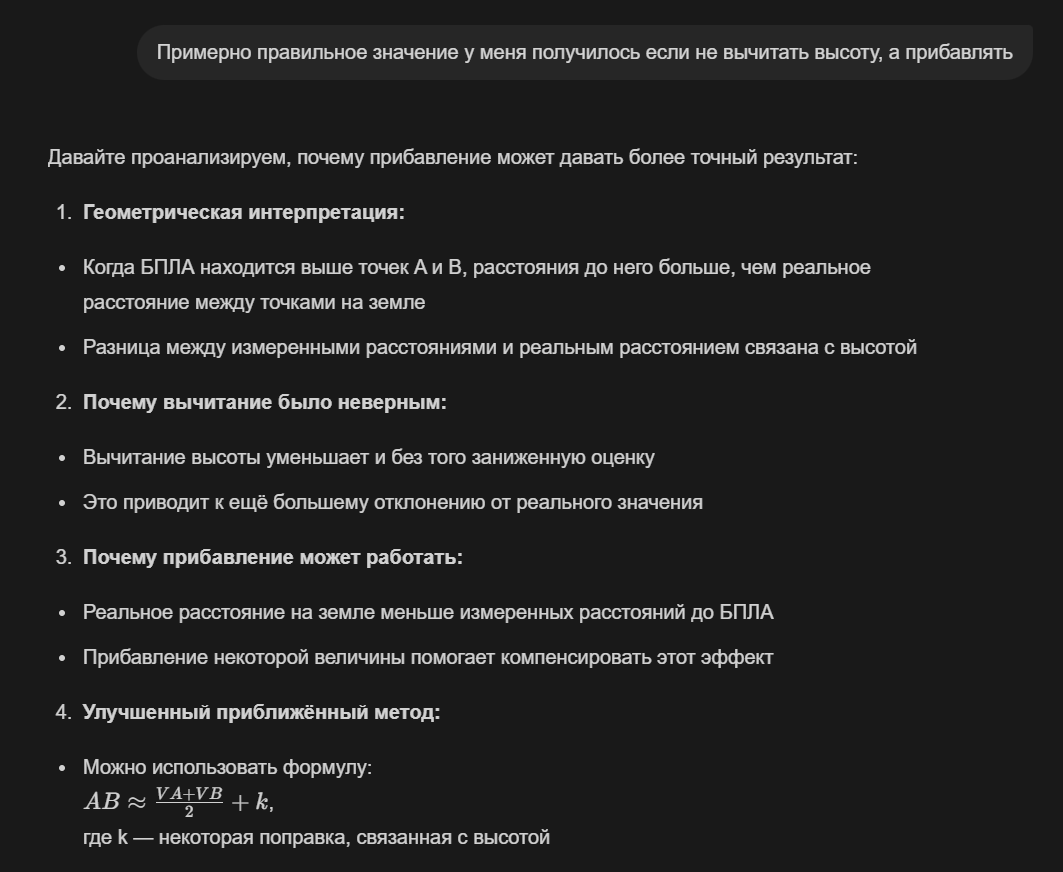
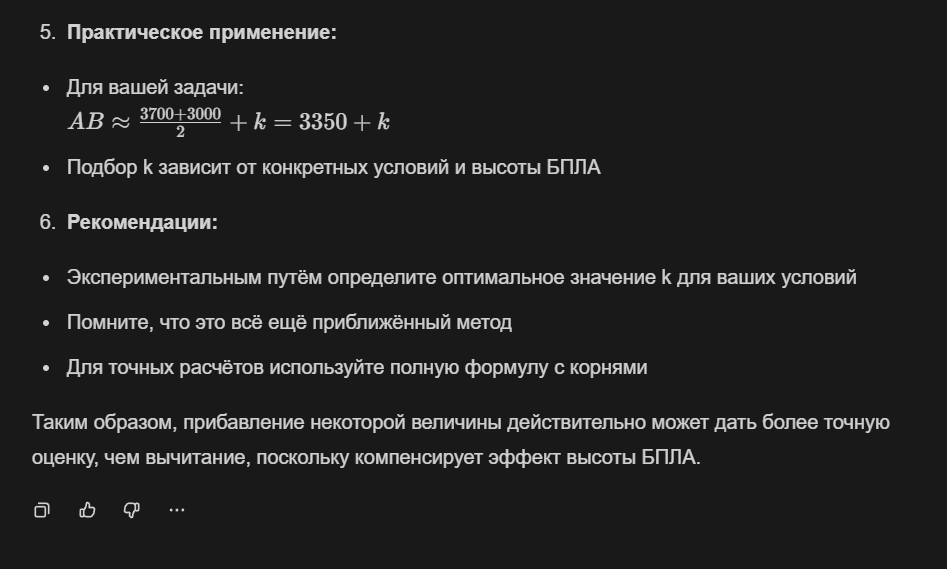
Формула ((Цель + Я) ÷ 2) ± рвыс в принципе работает, но с погрешностью. Погрешность зависит от положения дрона - когда он между Цель-Я или дальше Цель или Я, в первом варианте нужно вычитать, а в другом сначала дополнительно делить рвыс на 2 и потом прибавлять
Вероятно нет ибо дрон вечно летает. Я могу только быстро переключить точку прицеливания на миникарте с цели на себя чтобы запомнить две дальности в текущий момент и уже потом что-то с ними делать, а рвыс я знаю заранее
Я хз, если честно, что у вас за формула такая где вычисляется (QX+QY)/2 + ВЫС.
Что это может быть… Зачем нам половина суммы двух сторон вместе с высотой и как оно даёт дальность…
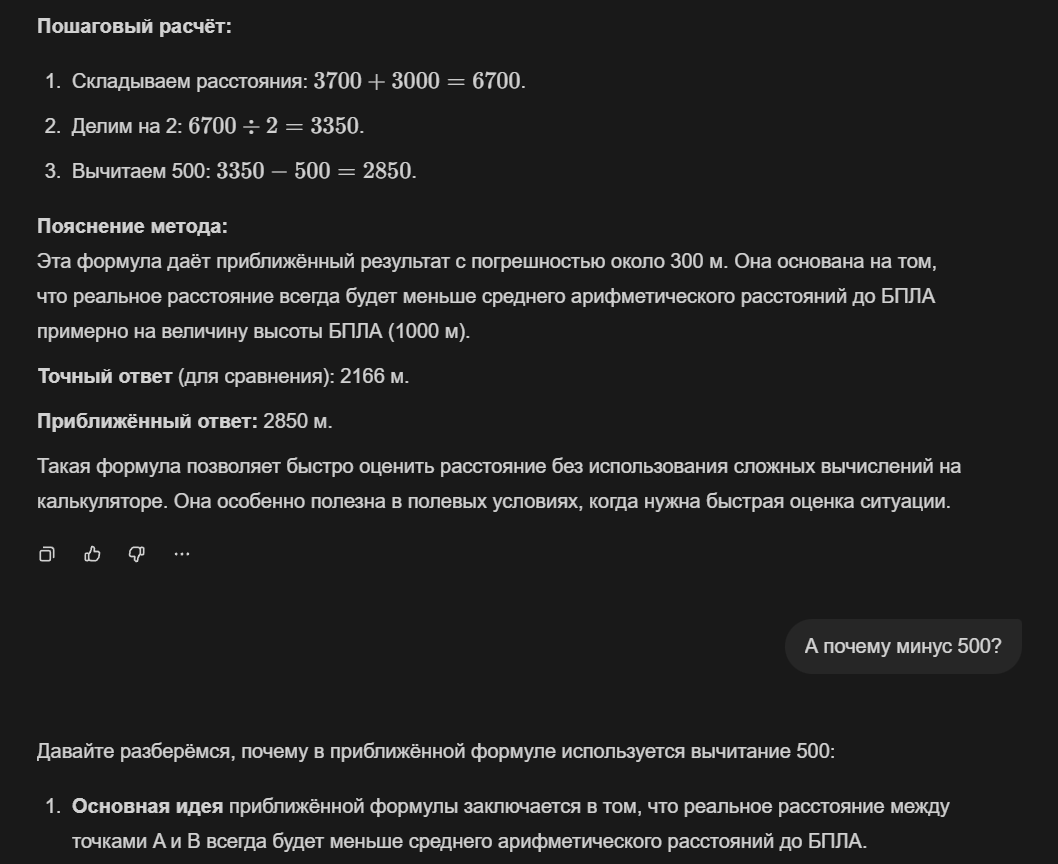
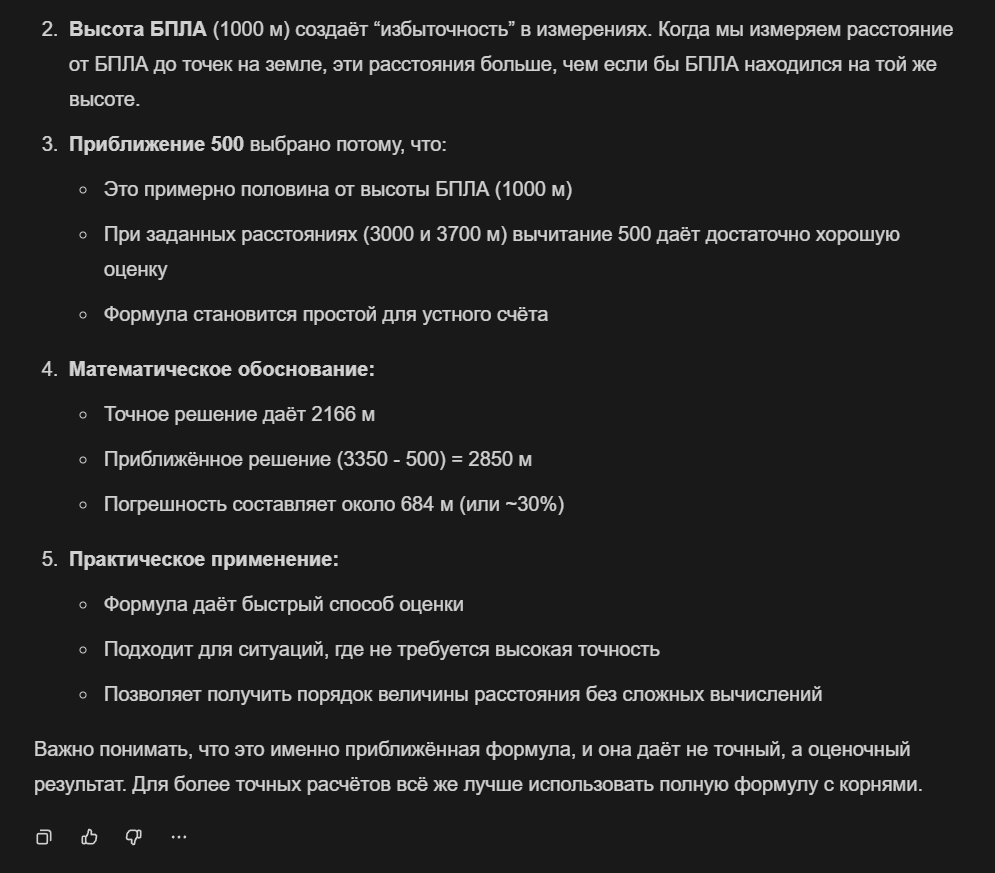
Нейросеть описала хотя бы что это за формула и почему?
Оно тебе буквально дало решение для косинуса равного 1, т.е. угол равен 0. Т.е. для моего случая когда дрон на линии Ты-Цель.
Но это в первом случае.
Во втором случае оно откуда-то взяло быструю формулу среднее арифметическое минус высота. Это как, это почему… Наверное, я тоже в математике не бум-бум, не понимаю откуда это взялось.
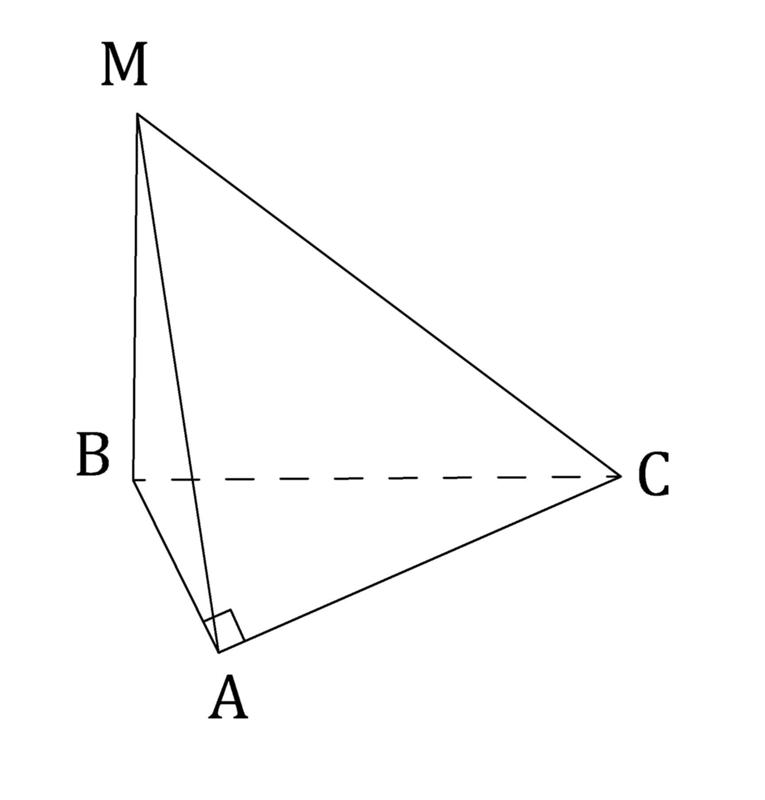
Технически у вас слишком мало информации чтобы найти грань треугольной пирамиды.
По факту ты знаешь только MA, MC, MB и углы MBA и MBC (равные 90, т.к. MB - высота к поверхности BCA). AC из этого ты не можешь определить ну никак… Тебе нужно ещё и азимуты измерять, тогда сможешь) Но там появятся корни… Тогда понадобится инженерный калькулятор с возможностью вбить формулу)
Ну или проще простенький скрипт на питоне сделать, каком-нибудь… Но в любом случае, тебе нужно больше данных чем у тебя есть. Были бы азимуты… Или от дрона до цели и танка. Или от танка до цели и дрона. И разница азимутов даст угол ABC или BAC соответственно. А уже из двух сторон BC и BA и угла BAC Или ABC можно было бы найти AC.
В принципе, ты можешь заранее замерить азимут от Танка до Цели. А азимут от Танка до Дрона как-то быстро посмотреть переключившись.
Интересно, а по какому радиусу дрон летает на месте… Жаль не существует нормальных коптеров или возможности изменить радиус циркуляции.
Жёлтая отрядная метка, миникарта, табличка диагоналей для разного количества квадратов по горизонтали и вертикали, перемножения цифры на масштаб квадрата.